上路去开车,最害怕的便是“鬼探头”以及视野盲区。就算你的车装了极为先进的摄像头还有雷达,面对距离几公里之外的突发事故或者前方大货车所遮挡的视野,也仅仅只能干瞪眼。这恰好就是当前智能驾驶的痛点所在:单车就算再聪明,也存在感知的极限。要真想实现零事故的愿景,必须得让聪明的车跟智慧的路“握手”,而在这当中,路究竟该怎么进行“修”,学问可就大了。
车路协同式智慧高速是第一步
有个叫希迪智驾的(也就是长沙智能驾驶研究院),其所提出的建设框架清晰得很,智慧高速可不是简简单单地去铺路架桥,而是要去构建起一个数字化的交通体系,这个体系涵盖道路感知体系,还有全路段高精度定位,以及路侧V2X通信,另外还有一个云端的大脑,这情形仿佛是给高速公路装上了神经系统,使得每一寸路面都能够“说话”。
车路协同式智慧高速,是这个框架的第一步,其核心思路为“主从配合”,即自动驾驶车辆自行负责决策与控制,而路侧端会实时感知全路段交通态势,且将结果经由V2X传递给车,这恰似给车配备了一位身处高空的瞭望员,能提前把看不见的风险告知它。
路侧感知为自动驾驶补盲
高速之上,车速达至120公里每小时之际,安全刹车距离常常动辄便有上百米。当下,车载传感器的极限感知能力一般仅在100到200米之间,当遭遇弯道之时,或者遇到坡顶之际,又或者挨着大货车遮挡的情况时,此距离根本没法确保安全。此时,路侧系统的价值便显现出来了。
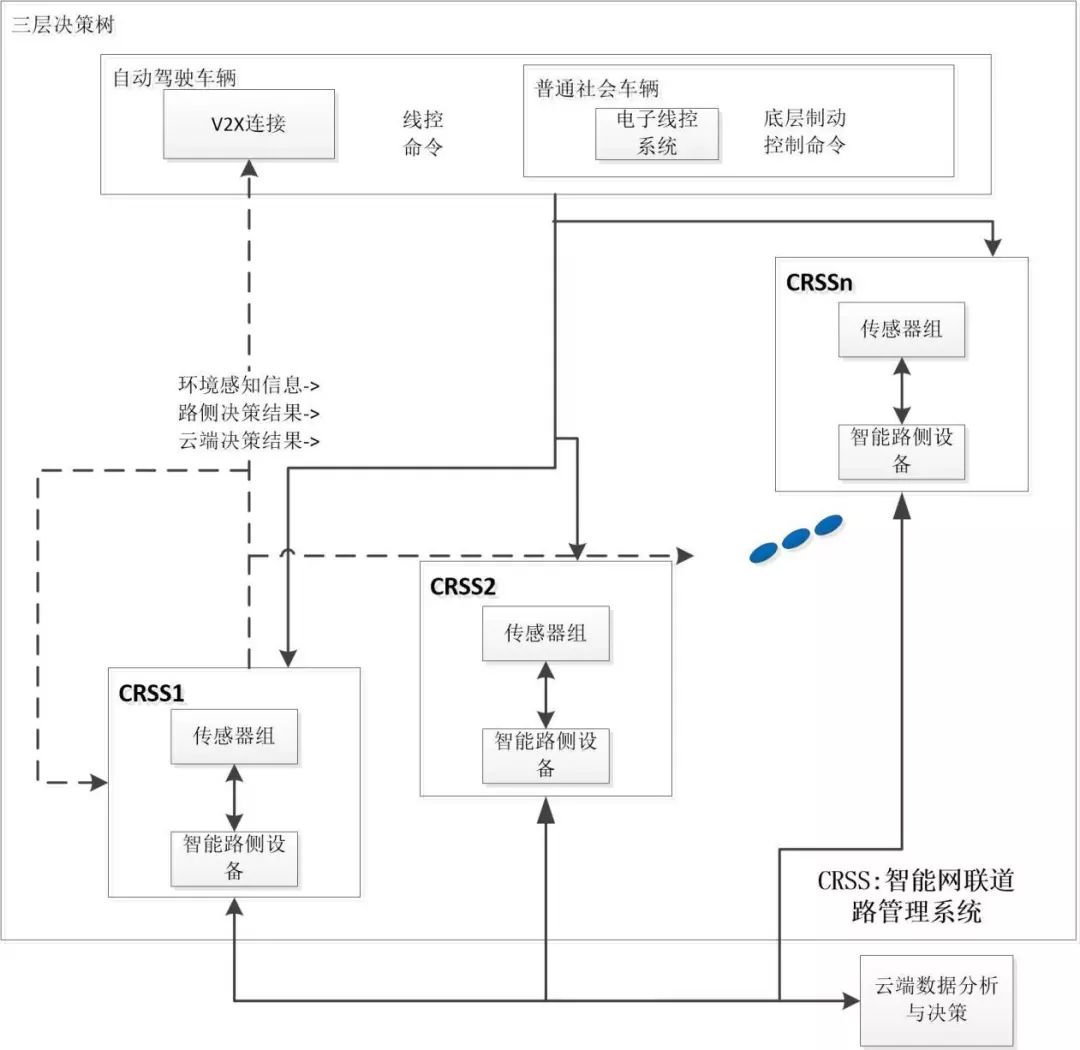
沿着线路所布置的智能网联道路管理系统,也就是CRSS,具备超视距感知的能力,它借助路侧安置的,诸如摄像头、雷达这般的传感器,能够采集达1公里乃至更远距离的路况视频以及数据,并且通过V2I,也就是车辆到基础设施的通信方式,实时传递给自动驾驶车辆车辆获取这些数据之后再去做出决策,这就如同将“视力”从200米直接延伸至1000米,安全性自然而然地便得到大幅提高。
多级决策架构降低车辆硬件成本
此套方案的精妙所在之处,更在于其构建了一套多级决策的架构体系,,先是最基础的车端自行进行决策,而后路侧单元协助做出边缘决策,最终甚至于能够借助低延时网络(像是5G)达成云端全局决策,,这般分工协作,赋予了自动驾驶极大的灵活性。
意味着未来并非必然要在每一部车辆之上都堆满价格高昂的激光雷达以及高性能的计算平台,因部分智能被转移至路途中,车辆能够变得较为’轻量化‘,有需要之时,以路侧端的感知决策控制作为主导,车辆予以辅助执行,如此便能在低成本硬件的条件基础上,达成具备高可靠性的主动安全。
不止服务自动驾驶惠及所有社会车辆
这套名为“V2X+智慧高速”的解决方案,其服务对象并非只有少数自动驾驶测试车,对于那些已具备网联能力的车辆而言,它能够借助车上的OBU也就是车载单元,来加以提供基于V2X打造的高级辅助驾驶功能,像前方事故预警、施工区提醒这样的功能,进而有效保障安全、提升效率。

更为贴心之处在于,针对道路上行驶的多数普通社会车辆情形,用户根本无需更换车辆。仅需于手机之上安装由希迪智驾所提供的特定APP,车辆便能够拥有V2N(车辆到网络)通信能力,进而体验到部分高级辅助驾驶功能,预先规避风险。这显著降低了技术的普及门槛,使得安全能够惠及每一个单独个体。
高精度定位是智慧高速的基石
想要促使路与车达成协同,首要的是明确知晓车于道路上所处的精确位置,普通的GPS导航存在着误差达几米的情况,在高速公路上根本无法分辨车辆究竟是处于主车道还是应急车道,鉴于前述状况,该方案给出了两种车道级别的精准定位方式,分别是路侧高精度定位辅助基站以及摄像头辅助定位。
智能单元被安置在路侧,其内部设置了RTK定位系统,此系统如同一个微型基站,借助V2I通信向过往车辆传送差分定位数据,也就是RTCM信息包,车辆接收到这些数据后,便能够校正自身的卫星定位信号,达成厘米级的定位精度,而这正是所有智能调度以及精准控制的根基所在。
云端大脑实现全局交通调度
那些路侧采集而来的数据,车辆的实时状态,最终都将会汇聚入智慧高速的“云控平台”。此平台乃是真正的核心枢纽,它承担着智能网联道路的数据管理工作,V2X 场景的云计算以及决策任务,还有对自动驾驶车辆的监测与管理职责。它使得交通调度不会再被局限于某一个路口或者路段。
根据汇聚而来的数量众多的交通数据,进行整合处理之后,云平台能够形成可用于分析预测的模型。举例来说,预测往后半小时哪条路段存在拥堵的可能性,进而提前引导车辆进行分流;又或者为特殊车辆科学规划出一条最为畅通无阻的绿色通道。它促使道路基础设施达成全面数字化,使得“人车客货”切实达成互联互通。
在读完这些内容之后,你有没有去思考过这样一个疑问呢:当道路上行驶的车辆以及道路本身都变得足够具备那种“聪慧”的特质,甚至能够达成全自动化的超级高速行驶状态时,我们获取驾照的途径会不会完全地消失不见呢?欢迎各位在评论区域分享你们自身的看法,通过点赞的方式让越来越多的人参与到讨论当中来!



